August 1, 2023
test D I want to be first!!
DaijiroHashimoto
If you check
Document>>Stick to the Front Page
and the selected page on the top?????
It seems the function did not work as i expected ><
Description welcome to laboratory

If you check
Document>>Stick to the Front Page
and the selected page on the top?????
It seems the function did not work as i expected ><
this is article 2
helloworld!
| abc | cde |
| aer | asd |
hello i am HAl 9000
Daisy, Daisy,
Give me your answer do! ….
i am accessing without log in WordPress accoung. it seems i have to fill “Name” and “Email”.
name is stranger, email is a@gmail.com
photo is automatically selected. I don’t know his face.
And there are no meaning email address
どうやらコメントは承認しないと他の人が見えるようにならないようだ。
たぶん設定で変更できるだろうけど
Apparently you have to approve comments to make them visible to others.
Maybe you can change that in the settings.
[[ Topics ]]
1, MG400, ROS
2, Future Plan
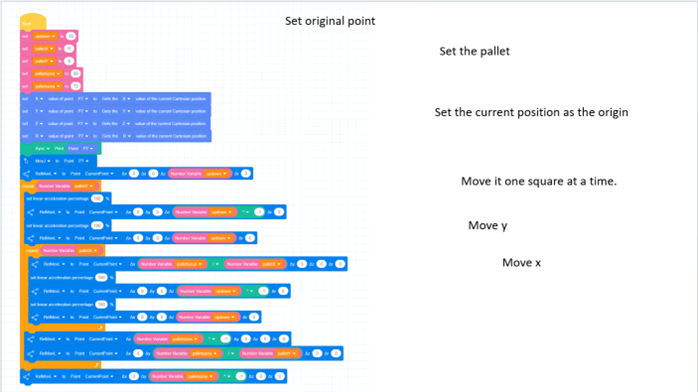
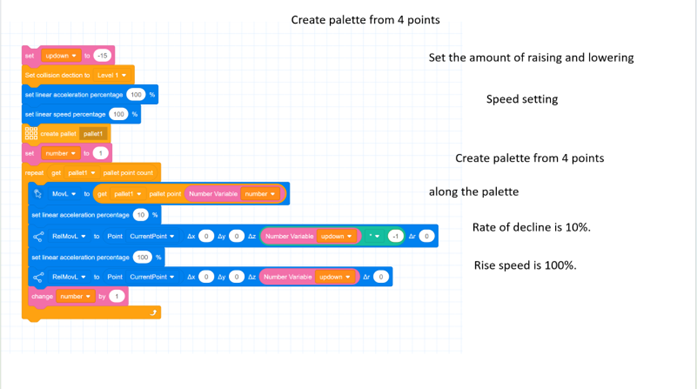
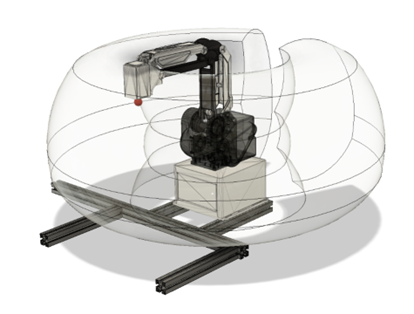
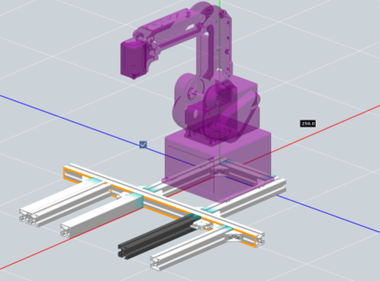
MG400 [Objective: to try new robot]

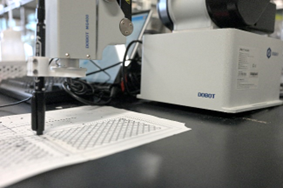
mg400 has arrived.

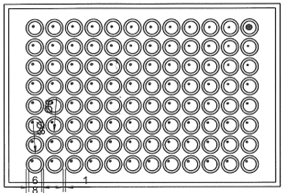
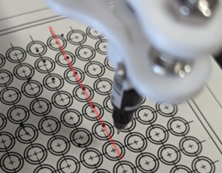
The test is performed using a pen.
First, I tested whether we could dot the surface of the well plate with precision. I found the robot arm to be highly accurate.
コード is here.
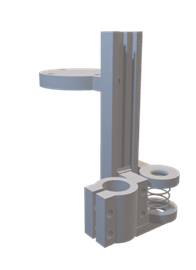
1, A pen nib are damaged.
At first, it was done with a v1 holder, but the robot arm did not adjust to the force, and the entire robot lifted, and the nib was crushed.
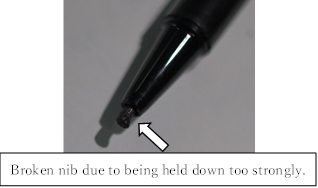
I created a spring-loaded solution(v2).

→When using a robot to make contact, a spring, soft material, or other force-absorbing object is required
Control method
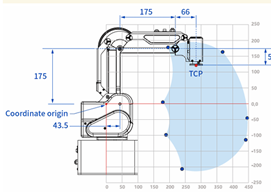
2, Coordinates do not match
The program and the actual position must be aligned.
In other words, even if the program is correct, it must be placed correctly.
It is not impossible to correct the coordinates, →but it is easier to follow the guide.
Conclusion
1, Need spring or soft material (if contact to something), 2, Need guide to place correct,
Of course, appropriate end-effectors are also needed.
Future Plan
Straight lines cannot be drawn with the v2 pen holder.
Create one with guides so that only up and down movement is possible. Planning(v3)
A similar move will be made in Python.
→ Use Python+ROS All codes work the same way.
Leave a Reply